













Комплект разработчика PX4 Vision V1.5
SKU
Описание
Все таможенные и транспортные процедуры мы осуществим и продукция будет доставлена по вашему адресу в Российской Федерации.
У нас нет розничных продаж. Минимальный заказ +500 шт.
Описание
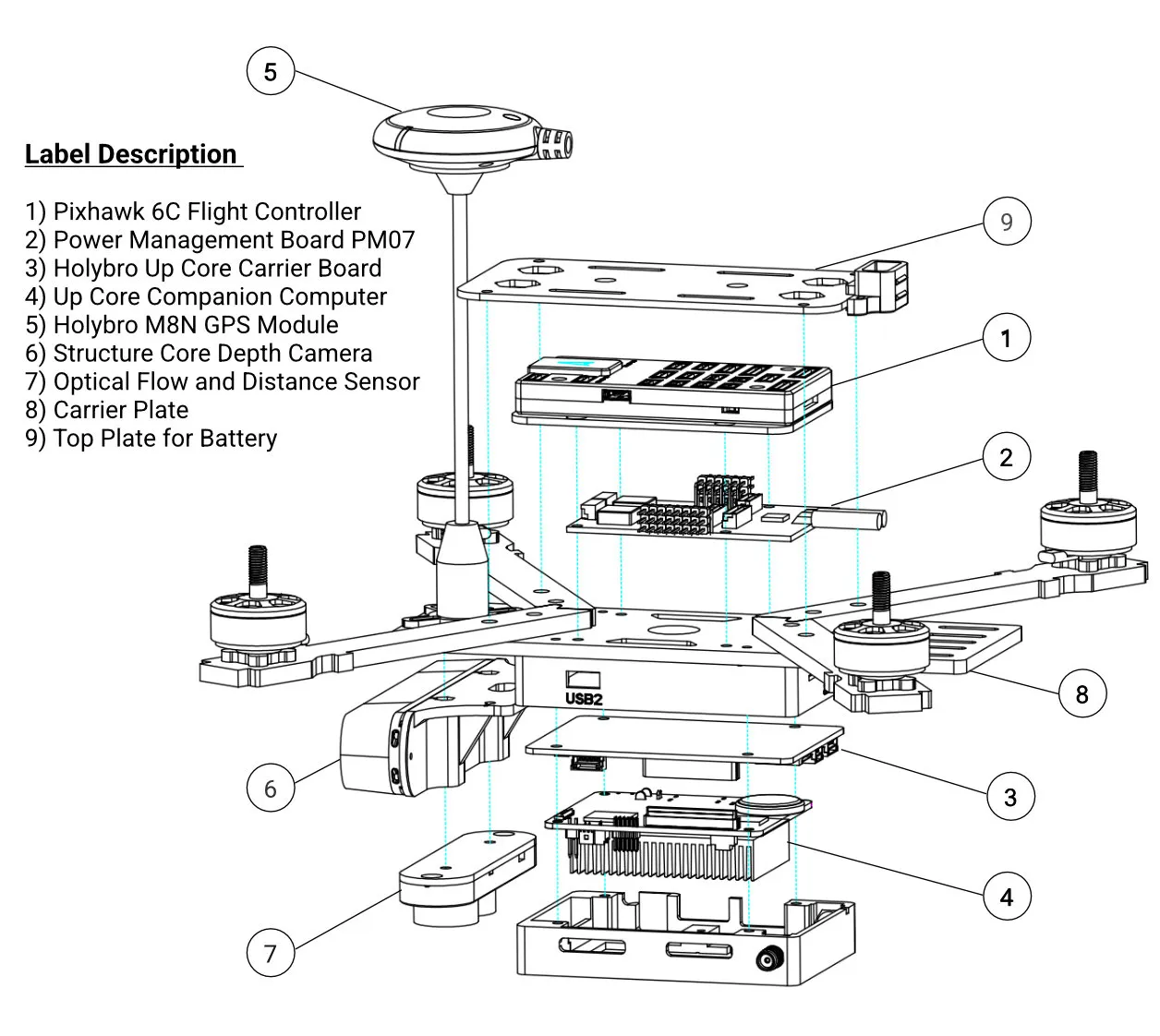
PX4 Vision Autonomy Development Kit — это надежный и недорогой комплект для разработки систем компьютерного зрения на автономных транспортных средствах. В комплект входит почти готовый к полету квадрокоптер из углеродного волокна, оснащенный полетным контроллером Pixhawk 6C, компьютером-компаньоном UP Core (4 ГБ памяти и 64 ГБ eMMC) и датчиком глубины камеры Occipital Structure Core. Корабли предварительно собраны.
Примечание: Этот автомобиль поставляется без предустановленного программного обеспечения. Существует USB-накопитель с предварительно созданным образом, который имеет эталонную реализацию программного обеспечения локального планировщика PX4/Avoidance, предоставленного Auterion. Это базовое программное обеспечение, используемое только в качестве справки, чтобы показать основные функции, которые может выполнять машинное зрение PX4. Разработчики могут использовать комплект для опробования других функций, предоставляемых проектом PX4 Avoidance, изменения существующего кода или экспериментов с совершенно новыми функциями на основе компьютерного зрения. Программное обеспечение несовместимо с последней версией PX4, а также не поддерживается активно.
Комплект средств разработки PX4 Vision состоит из следующих компонентов:
-
Основные компоненты:
-
1x полетный контроллер Pixhawk 6C (новинка с v1.5)
-
1x PMW3901 оптический датчик расхода (Thone ThoneFlow-3901U, подключается через последовательный порт Telem3)
-
1x инфракрасный датчик расстояния TOF (PSK-CM8JL65‐CC5, подключен через порт GPS 2)
-
1x камера глубины ядра структуры
-
Широкоугольная камера 160 градусов
-
Стерео инфракрасные камеры
-
Бортовой ИНС
-
Мощный многоядерный процессор глубины NU3000
-
-
1x UP Core компьютер (4 ГБ памяти и 64 ГБ eMMC с Ubuntu и PX4)
-
® Intel Atom x5-z8350 (до 1,92 ГГц)
-
Совместимые ОС: Microsof t Windows 10 полная версия, Linux (ubilinux, Ubuntu, Yocto), Android
-
FTDI UART, подключенный к полетному контроллеру
-
USB1: USB3.0 Порт, используемый для загрузки среды предотвращения PX4 с флешки USB2.0 (подключение периферийного устройства USB3.0 может привести к заглушению GPS). -
USB2: Порт USB2.0 на разъеме JST-GH. Можно использовать для второй камеры, LTE и т.д. (или клавиатуры/мыши во время разработки). -
USB3: Порт USB2.0 JST-GH подключен к камере глубины -
HDMI: Выход HDMI -
Слот для SD-карты
-
WiFi 802.11 b/g/n @ 2.4 ГГц (подключен к внешней антенне #1). Позволяет компьютеру получить доступ к домашней сети Wi-Fi для доступа в Интернет.
-
-
-
Механические характеристики:
-
Рама: Полная саржа из углеродного волокна 5 мм 3k
-
Двигатели: T-MOTOR P2207 V3.0 KV1750 (Новинка с v1.5)
-
ESC: BEHEli-S 20A ESC
-
Гребные винты: Gemfan 6030-3 (Новый с v1.5)
-
GPS: GPS-модуль Holybro M8N с новой мачтой из углеродного волокна
-
Силовой модуль: Holybro PM07
-
Колесная база: 286 мм
-
Вес: 893 грамма без аккумулятора и реквизита
-
Телеметрия: ESP8266 подключен к полетному контроллеру (подключен к внешней антенне #2). Обеспечивает беспроводное подключение к наземной станции.
-
-
Флешка USB2.0 с предварительно прошитым программным обеспечением, предоставленным Auterion, которая включает в себя:
-
Ubuntu 18.04 LTS
-
ROS Мелодик
-
Драйвер ROS ядра затылочной структуры
-
МАВРОС
-
- Различные кабели, 8 пропеллеров, 2 аккумуляторных ремня (установлены) и другие аксессуары (их можно использовать для подключения дополнительных периферийных устройств).
- Защита пропеллера (приобретается отдельно)
Руководство пользователя PX4:
Ссылка:
- Различия между PX Vision v1 и v1.5
- USB-накопитель Image & StructureCore Downgrader
- Для получения дополнительной технической информации, пожалуйста, посетите страницу документации Holybro.
Запчасти


















