



Комплект разработчика PX4 — X500 v2
SKU
Описание
Все таможенные и транспортные процедуры мы осуществим и продукция будет доставлена по вашему адресу в Российской Федерации.
У нас нет розничных продаж. Минимальный заказ +500 шт.
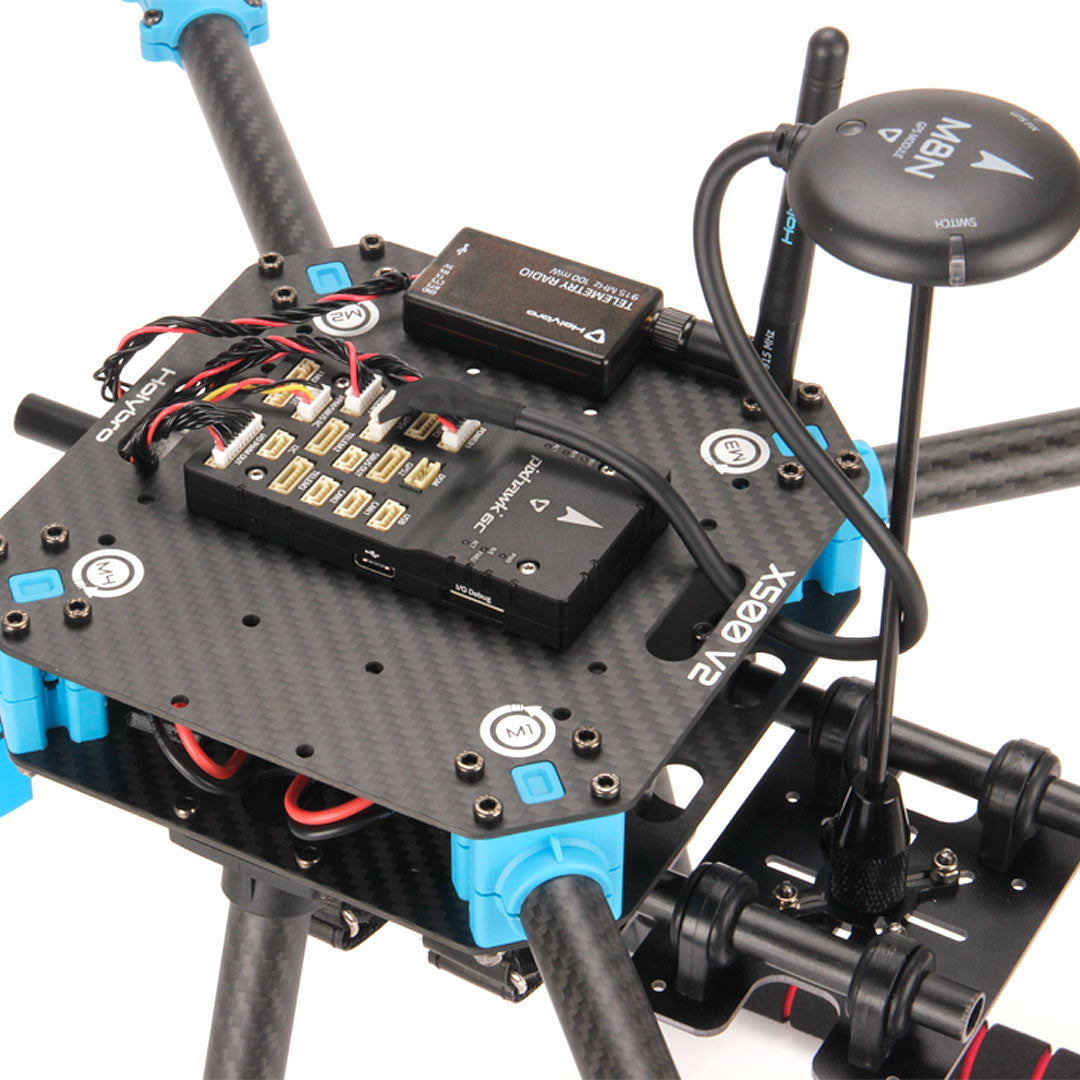
Комплект разработчика PX4 — X500 v2 — это доступный, легкий и надежный профессиональный комплект дрона для разработки из углеродного волокна с новейшим контроллером полета автопилота Holybro Pixhawk 6C или Pixhawk 6X , M8N GPS и телеметрической радиостанцией SiK plug & play. Он быстро и легко собирается (~30 минут) без необходимости пайки, поэтому вы можете потратить больше времени на полеты и разработку. Он поставляется с комплектом рамы X500 V2 и двигателями, регуляторами, платами распределения питания и дополнительными пропеллерами. Манипуляторы дронов предварительно оснащены двигателями и регуляторами, поэтому их можно подключать прямо к плате распределения питания без необходимости пайки.
Рама (X500 v2) изготовлена из саржи из углеродного волокна, с трубчатыми рычагами из углеродного волокна, поддерживаемыми недавно разработанными нейлоновыми разъемами, армированными волокном, с удобными насечками как со стороны двигателя, так и со стороны корпуса, что обеспечивает гораздо более простую и понятную установку. Шасси состоит из труб из углеродного волокна диаметром 16 мм и 10 мм с разъемами, которые были утолщены и усилены.
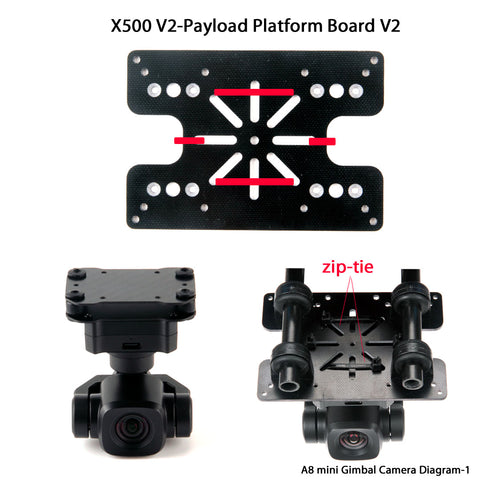
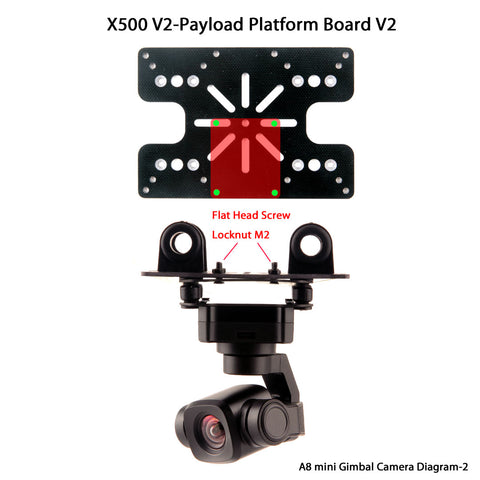
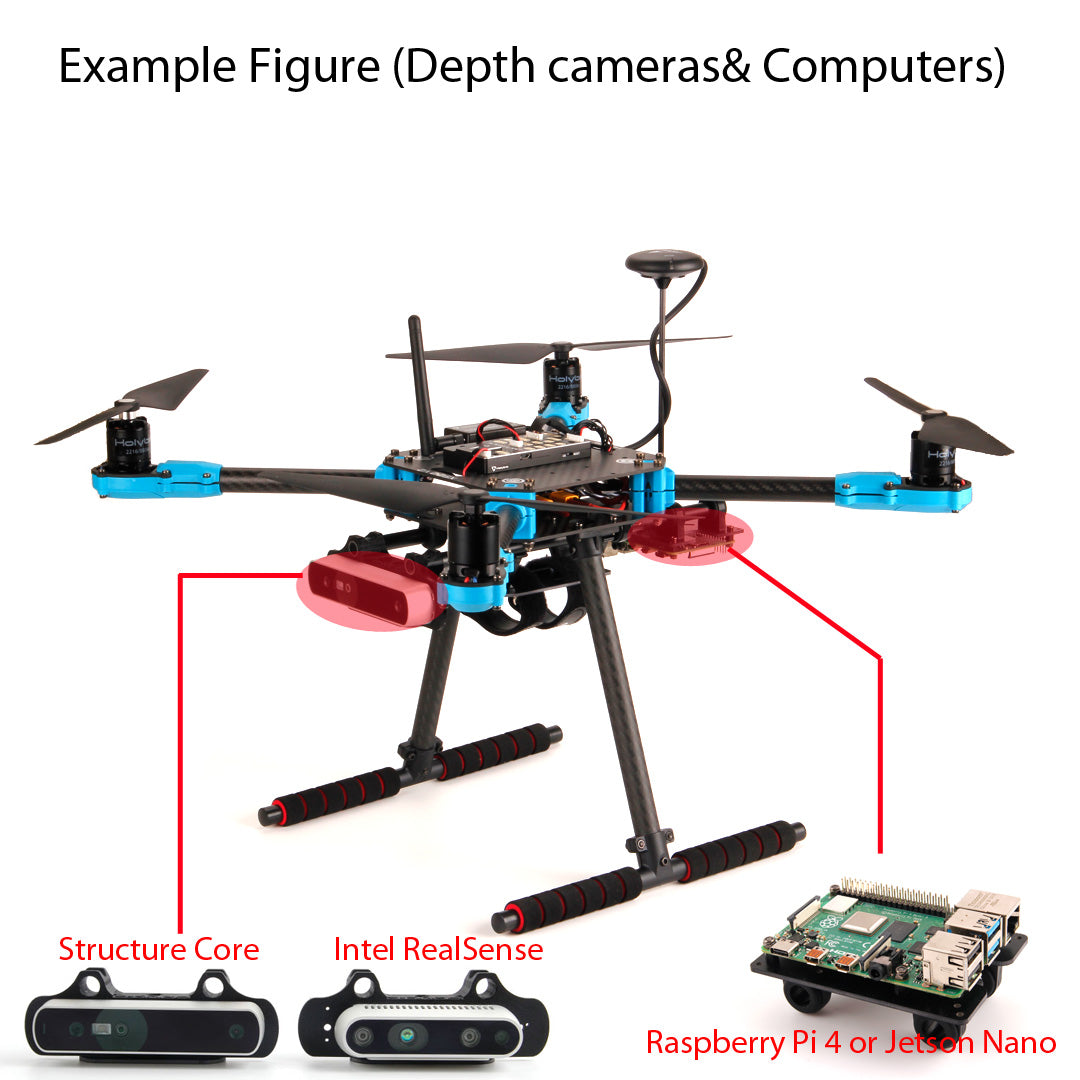
На платформенной плате теперь есть монтажные отверстия для GPS и популярных компьютеров-компаньонов, таких как Raspberry Pi 4 и Jetson Nano. Существует дополнительное крепление для камеры глубины (приобретается отдельно) для различных камер глубины, таких как камеры глубины Intel серии RealSense и камеры глубины Structure Core. Расстояние между верхней и нижней пластинами из углеродного волокна было увеличено, чтобы обеспечить более легкий доступ. Регулируемая монтажная плата для аккумуляторов была увеличена для поддержки более мощных батарей для увеличения времени полета. Система крепления на рейку готова к установке целого ряда креплений для камер и стабилизаторов для различных применений. Все инструменты для установки предоставляются в комплекте.
Заметка: Полетный контроллер Pixhawk 6C совместим как с PX4, так и с Ardupilot, но поставляется с прошивкой автопилота PX4 с открытым исходным кодом.
Особенность:
- Совершенно новый полетный контроллер Pixhawk 6C или Pixhawk 6X с GPS-модулем M10 и телеметрическим радиомодулем SiK Plug & Play
- Новая конструкция рамы с минимальным временем сборки (~30 минут), не требует пайки
- Рама из углеродного волокна с нейлоновыми разъемами, армированными волокном, обеспечивает простую и понятную установку
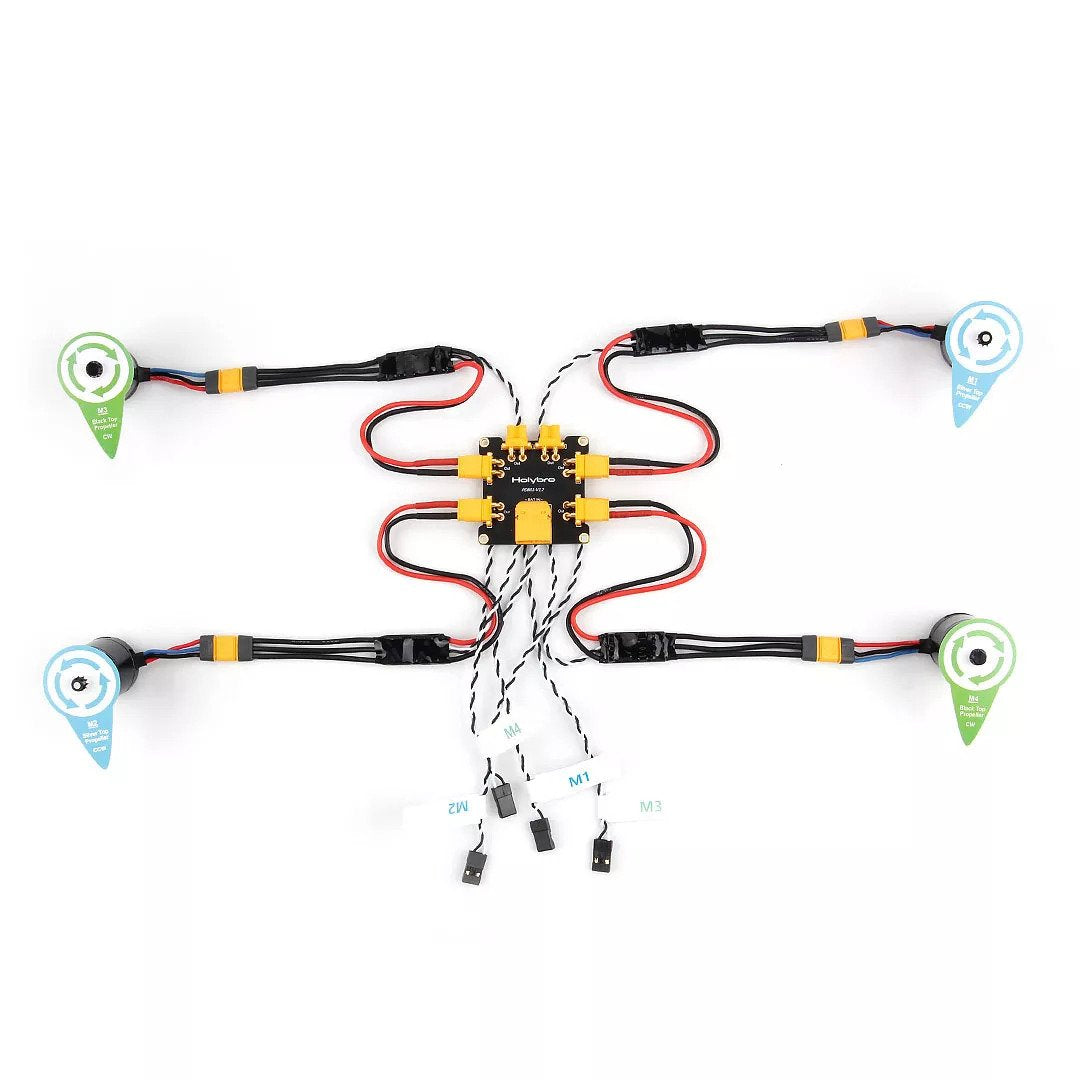
- Предустановленные двигатели и регуляторы с простыми разъемами питания XT30 для PDB
- Распределительный щит питания (PDB) с разъемами XT60 и XT30
- Крепление для компьютера-компаньона, такого как Raspberry Pi и Nvidia Jetson Nano
- Дополнительное крепление камеры глубины для Intel RealSense и Structure Core
Примечание.
- Версия Pixhawk 6X теперь поставляется с версией PM02D-HV (High Voltage). В PX4 вы должны установить SENS_EN_INA228, чтобы включить это. Эта высоковольтная версия поддерживается только в ardupilot 4.4 и более поздних версиях. Руководство по настройке можно найти здесь.
-
Поддержка прошивки для M10 GPS: Требуется PX4 1.14 и ArduPilot 4.3 или новее.
Комплект разработчика PX4 — X500 v2 включает в себя:
- Контроллер полета автопилота: Pixhawk 6C (пластиковый корпус) и PM02 V3 или Pixhawk 6X (стандартная база) и PM02D
- GPS-модуль M10
- Телеметрическая радиостанция SiK V3 433/915 МГц
- Комплект рамы X500 V2 (SKU30120)
- Предустановленные элементы:
- 1045 Гребные винты (6 шт)
- Плата распределения питания (штекер XT60 для батареи и штекер XT30 для регуляторов и периферийных устройств)
-
Другие дополнительные предметы (продаются отдельно)
- Радиоуправляемый контроллер RadioMaster TX16S
- Приемник RadioMaster R81
- Крепление камеры глубины
Детали комплекта рамы X500 V2 (SKU30120):
- Корпус — верхняя и нижняя пластина из углеродного волокна (144 x 144 мм, толщина 2 мм)
- Кронштейн — Высокопрочные и сверхлегкие 16-миллиметровые трубки из углеродного волокна с нейлоновыми разъемами новой конструкции
- Шасси — трубы из углеродного волокна диаметром 16 мм и 10 мм с усиленными и улучшенными пластиковыми тройниками.
- Платформенная плата — с монтажными отверстиями для GPS и популярных компьютеров-компаньонов, таких как Raspberry Pi 4 и Jetson Nano
- Двойная система крепления стержня Ø 10 мм x длина шины 250 мм
- Крепление для аккумулятора с двумя ремнями для аккумулятора
- Ручные инструменты для монтажа
Механические характеристики:
- Колесная база: 500 мм
- Схема крепления двигателя: 16×16 мм
- Корпус рамы: 144×144 мм, толщина 2 мм
- Высота шасси: 215 мм
- Расстояние между верхней и нижней пластинами: 28 мм
- Вес: 610гр
- Время полета: ~18 минут зависания без дополнительной полезной нагрузки. Протестировано с аккумулятором емкостью 5000 мАч.
- Полезная нагрузка: 1500 г (без аккумулятора, 70% дроссельной заслонки)
- Рекомендуемый аккумулятор: 4S 3000-5000 мАч 20C+ с батареей XT60 Lipo (не входит в комплект)

Ссылка:
Файл САПР 3D-печати и рамы:
Руководство по установке:
Руководство по настройке PX4
Руководство по настройке Ardupilot
Несколько советов: